Arduino è in grado di gestire segnali PWM attraverso le sue uscite digitali, ma è anche in grado di regolare la frequenza pwm di tali pin:
In molti articoli ho utilizzato e descritto i segnali PWM e come utilizzarli parlando spesso di Duty Cycle ossia del ciclo di lavoro in cui hai uno stato attivo ( HIGH ) all’interno di un periodo ti tempo stabilito.
Ti invito a leggere l’introduzione sull’argomento in questo articolo.
Qualche giorno fa ho letto che la frequenza di lavoro dei pin PWM su Arduino non è la medesima per tutti i pin.
Prendi ad esempio l’Arduino Uno ( o qualsiasi altro Arduino basato sull’Atmega328 ) sono presenti 6 uscite, che puoi individuare grazie al simbolo ~, utilizzabili come PWM:
ma non tutte lavorano alla stessa frequenza.
In pratica arduino dispone di tre timer distinti definiti Timer0, Timer1 e Timer2 gestiti dall’Atmega328 a ciascun Timer sono collegati 2 comparatori ( Output Compare – OC ) definiti OCxA e OCxB, in cui x vale 0,1 e 2 ciascun numero corrisponde ad uno dei timer, ad ogni comparatore è collegato un pin arduino, ed ecco i 6 pin PWM:
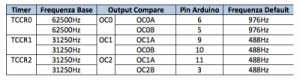
Guardando la tabella noti innanzitutto che i 3 timer sono riportati con la disitura TCCRx in cui x vale 0,1 e 2 e che il Timer0 ha una Frequenza doppia rispetto agli altri due che si ripercuote alla fine della tabella sulla Frequanza PWM di Default in cui la Frequenza PWM dei pin 5 e 6 è doppia rispetto a quella dei pin 3,9,10 e 11.
Differenza di Frequenza PWM
La differenza di Frequenza PWM tra la coppia di pin 5 e 6 e gli altri ti porta a fare delle considerazioni:
- se vuoi collegare due motori o servo motori da controllare in PWM scegli i pin con frequenza uguale;
- la frequenza pwm di default è alquanto bassa;
se consideri che la frequenza PWM del Timer è ad esempio 31250Hz come è possibile che la Frequenza PWM di default sia di soli 488Hz?
La risposta è nel fatto che ciascun Timer ( TCCRx ) possiede due registri denominati A e B, rispettivamente per il Timer0 sono TCCR0A e TCCR0B il cui compito è definire le modalità di funzionamento e altri parametri dei Timer stessi. In particolare il Registo B ( TCCR0B, TCCR1B, TCCR2B ) ha anche il compito di impostare un prescaler che puoi immaginare come una sorta di dividendo della frequenza PWM.
I prescaler sono 5 per i pin connessi ai Timer 0 ed 1: 1,8,64,256,1024 e 7 per il Timer2: 1,8,32,64,128,256,1024 ed il valore di prescaler di default è 64 per tutti i Timer da cui:
31250Hz / 64 = 488Hz
62500Hz / 64 = 976Hz
Modificando quindi il prescaler di un Timer puoi variare la Frequenza PWM dei pin collegati ad esso.
Ricorda che la frequenza non è il Duty Cycle, variando la frequenza PWM otterrai un periodo inferiore ma non un duty cycle differente.
In questo modo la variazione del Timer 1 connesso ai pin 9 e 10 ti permette di continuare a impostare il duty cycle differente sui due pin con il comando analogWrite( pin, val );
Il Timer0 di Arduino
Il Timer0, a cui sono collegati i pin 5 e 6, è collegato anche alle funzioni di ritardo interne al micro controllore come ad esempio delay() e millis() ed è riferimento per la classe Servo ed altre librerie che sfruttano il Timer dell’Atmega328/168.
E’ quindi sconsigliato l’uso di questo Timer a frequenza differenti da quelle impostate dal costruttore per evitare comportamenti imprevisti delle funzioni citate.
Modificare la frequanza PWM
Hai visto che è possibile modificare la Frequenza PWM variando il prescaler dell’Output compare corrispondente ad un pin, per farlo è disponibile sul playground arduino questa semplice funzione:
|
01
02
03
04
05
06
07
08
09
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
|
void setPwmFrequency(int pin, int divisor) { byte mode; if(pin == 5 || pin == 6 || pin == 9 || pin == 10) { switch(divisor) { case 1: mode = 0x01; break; case 8: mode = 0x02; break; case 64: mode = 0x03; break; case 256: mode = 0x04; break; case 1024: mode = 0x05; break; default: return; } if(pin == 5 || pin == 6) { TCCR0B = TCCR0B & 0b11111000 | mode; } else { TCCR1B = TCCR1B & 0b11111000 | mode; } } else if(pin == 3 || pin == 11) { switch(divisor) { case 1: mode = 0x01; break; case 8: mode = 0x02; break; case 32: mode = 0x03; break; case 64: mode = 0x04; break; case 128: mode = 0x05; break; case 256: mode = 0x06; break; case 1024: mode = 0x7; break; default: return; } TCCR2B = TCCR2B & 0b11111000 | mode; }} |
in cui i pin 5,6,9,10 accettano solo cinque valori di prescaler che puoi impostare, mentre i pin 3 e 11 accettano anche tagli di prescaler a 32 e 128.
La funzione presentata puoi utilizzarla con la seguente sintassi:
setPwmFrequency(3, 8); |
in cui il primo parametro rappresenta il pin su cui vuoi impostare il prescaler ed il secondo parametro è il prescaler da impostare.
Nell’esempio il pin su cui andrai a modificare la frequenza PWM è il pin 3, collegato a OC2B e Timer TCCR2 e la frequanza PWM impostata sarà:
31250Hz / 8 = 3904Hz = 3,9KHz
Buona sperimentazione !!!
Auto Amazon Links: Auto Amazon Links The Associate tag is not set. Please check your unit settings.
Auto Amazon Links: Nessun prodotto trovato.

Grazie.

Sony WH-CH520 | Cuffie Wireless, Connessione Multipoint, con Microfono, Fino a 50 ore di durata della batteria con Ricarica rapida - Nero
29,99 € (a partire da 11 Marzo 2026 06:31 GMT +01:00 - Altre informazioniProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
FLLAO Magnetica Cover per iPhone 17 con 2 Pellicole in Vetro Temperato, Custodia iPhone 17 Compatibile con Magsafe, Traslucida Opaca Posteriore Sottile Antiurto Protettiva Case, Nero
9,99 € (a partire da 11 Marzo 2026 06:31 GMT +01:00 - Altre informazioniProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
JOREST 40Pcs Set Cacciaviti Precisione, Kit Professionali con Torx T1 T2 T3 T4 T5, TR6 T7 T8 T9 T10 T15, Triwing Y00, Stella P2/5, -1.0/2.0, etc, per Switch, PS4, Xbox, PC, Laptop, Occhiali, Orologio
10,99 € (a partire da 13 Marzo 2026 06:42 GMT +01:00 - Altre informazioniProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
OCONDA 24 Pezzi Gommini per Sedie Rotondi Silicone, Feltrini per Gambe di Mobili, Proteggere il Pavimento dal Rumore Nero (Fit:14-20mm)
14,24 € (a partire da 13 Marzo 2026 06:42 GMT +01:00 - Altre informazioniProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)