Auto Amazon Links: Auto Amazon Links The Associate tag is not set. Please check your unit settings.
Auto Amazon Links: Nessun prodotto trovato.
Questo articolo sarà considerato vademecum del IR2153, o meglio sarà presentato teoricamente come base per la costruzione di vari alimentatori ad impulsi.
IR2153 è un driver ad alta tensione con un oscillatore interno. Permette di realizzare alimentatori switching di potenza fino a 1,5 kW basati su circuiti a semi ponte con circuitazione minima.
Ho realizzato una tabella che evidenzia le differenze chiave tra i vari circuiti della famiglia IR21XX:
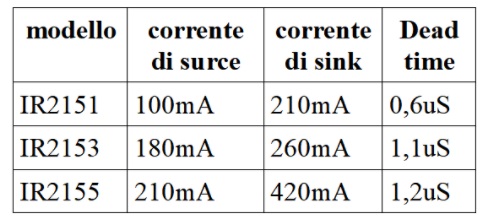
essi sono intercambiabili fino a che le potenze in gioco non sono elevate, ma fino quando siamo al di sotto dei 300W nulla vieta di usare indistintamente uno dei tre; se non si vuole rischiare conviene comunque mettere il più potente IR2155.
Nel corso dell’articolo spiegherò anche cosa siano queste differenze e quando usare un modello al posto di un altro.
Esistono due versioni dello stesso integrato, esse differiscono solo per la presenza di un diodo per la tensione di boost:
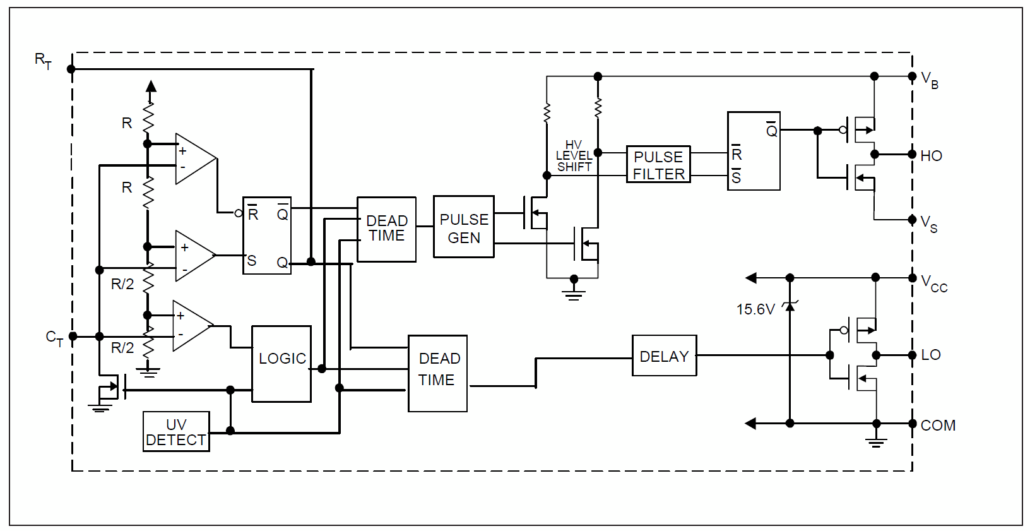
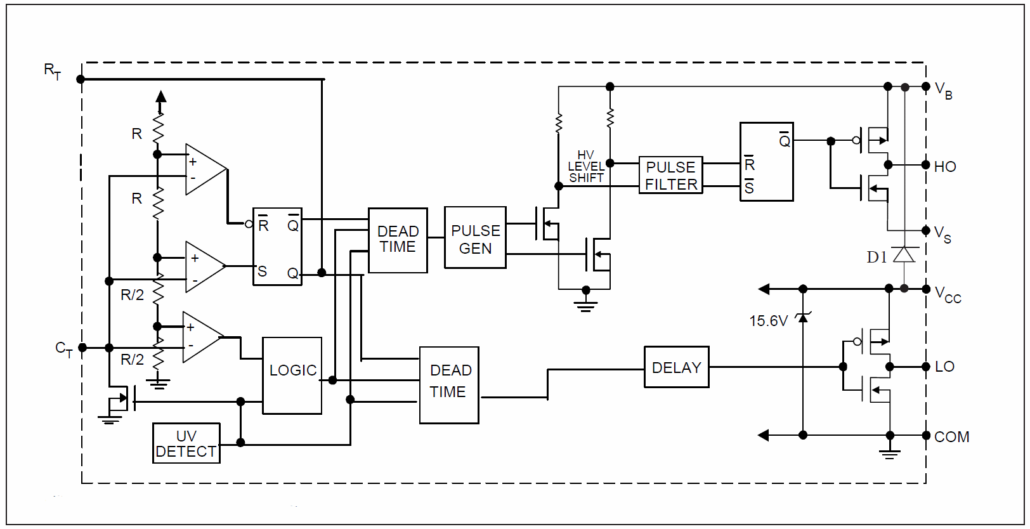
Schema funzionale del IR2153
Schema funzionale IR2153D con diodo D1 interno
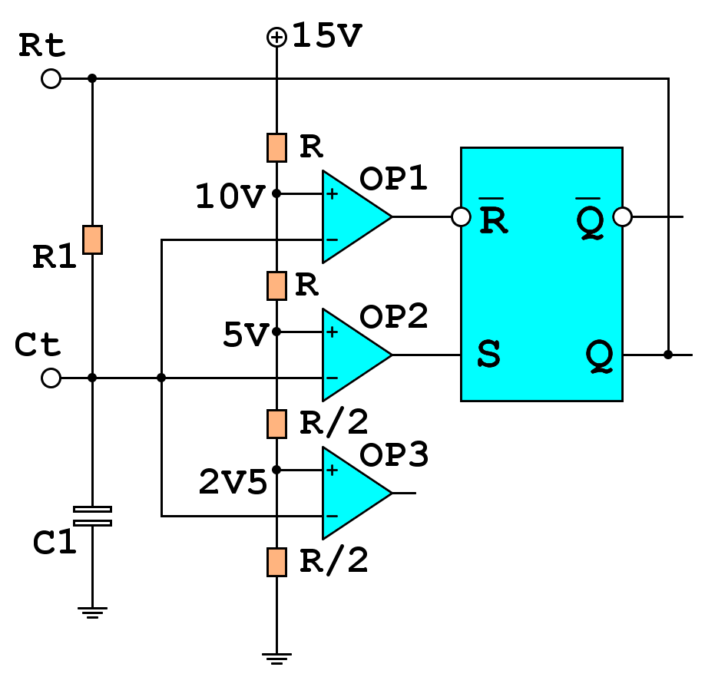
La figura seguente mostra lo stadio di ingresso costituito da tre op amp e il Flip-flop SR:
All’inizio non ci avevo fatto caso ma, ragionandoci un po ho capito dove avevo visto un circuito simile… gira che ti rigira anche a distanza di 50 anni continuano ad usare il famoso NE555!!!
Schema funzionale del 555
Inizialmente quando si applica tensione C1 è scarico e l’ingresso invertente degli op-amp è zero, e quello non non invertente ha tensione positiva fornita dal partitore resistivo.
Il risultato è che tutti e tre hanno tensione di uscita a livello logico uno.
Poiché l’ingresso R è attivo con livello zero non ha alcuna influenza sulla condizione di uscita, ma all’ingresso S setterà l’uscita Q del flip-flop che inizierà a caricare C1 attraverso il resistore R1.
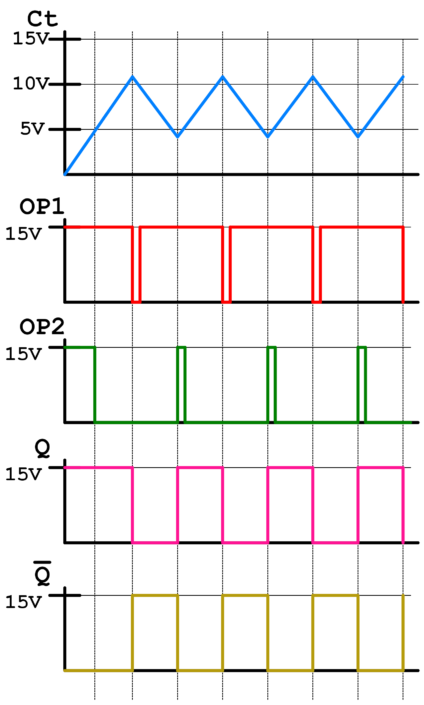
L’andamento della tensione in Ct è mostrato dalla linea blu, in rosso la tensione di uscita di OP1, in verde l’uscita di Op2, in rosa l’uscita Q del flip-flop e in senape l’uscita Q negata.
Non appena la tensione sul Ct supera 5 V l’uscita di OP2 va a zero, continuando a caricare C1 la tensione raggiunge un valore leggermente superiore a 10 Volt e questa volta va a zero l’uscita di OP1, che a sua volta porta a zero l’uscita Q del flip-flop.
Da questo punto C1 inizia a scaricarsi attraverso il resistore R1, e non appena la tensione ai capi sarà un po ‘meno di 10V l’uscita Op1 ritorna ad 1.
Quando la tensione sul condensatore Ct diventa inferiore a 5V l’uscita del Op2 resetterà il flip flop e Ct ricomincerà ricarica.
Nel chip ci sono due ulteriori moduli UV DETECT e LOGIC. Il primo di essi si occupa di abilitare il processo di carica di C1 solo al di sopra di una certa tensione di alimentazione e la seconda genera impulsi di ritardo che sono necessari per evitare che entrambi i finali siano conduttivi nello stesso istante cortocircuitando la alimentazione attraverso lo stadio di potenza.Successivo vi è una divisione di livelli logici per il mezzo ponte superiore e per quello inferiore.
Consideriamo lo schema tipico semplificato del IR2153:
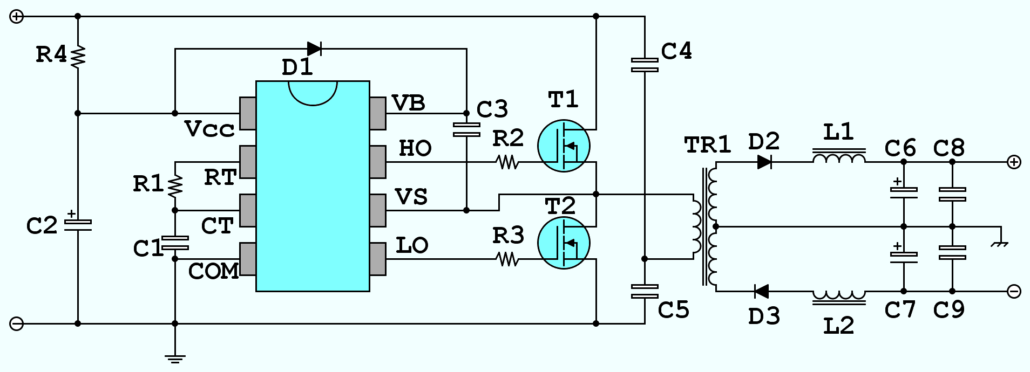
I pin 8, 7 e 6, rispettivamente, sono l’uscita VB, HO e VS, cioè, gestione dell’alimentazione ramo superiore (VB), pilotaggio dello stadio finale (HO) e negativo del modulo di controllo superiore del ramo (VS). Occorre prestare attenzione al fatto che nel momento in cui è attivo il ramo inferiore, il diodo D1 inizia a caricare C3 infatti con T2 in conduzione il condensatore è praticamente collegato a massa.
Una volta che le uscite cambiano stato T2 si isola , e tramite HO si porta in conduzione T1. A questo punto, la tensione su VS comincia ad aumentare fino al livello di alimentazione positivo generale, dato che T1 in queste condizioni ha una resistenza di decimi di Ohm.
Risulta che il mantenimento del transistore in conduzione necessita di una tensione di gate almeno 8 volt in più rispetto alla tensione di alimentazione, provvede appunto C3 caricato a 15 volt, che consente di mantenere il T1 conduttivo, grazie all’energia immagazzinata in esso quando T2 era conduttivo grazie a D1. In questa fase lo stesso diodo non permette al condensatore di scaricarsi sulla alimentazione stessa.
Non appena l’impulso di controllo sul pin 7 termina il transistore T1 si apre e si chiude al suo posto T2, che carica di nuovo il condensatore C3 ad una tensione di 15 V. Il valore di C3 dipende molto dal tempo in cui risulta conduttivo T1. Conviene evitare di usare elettrolitici per frequenze di funzionamento sopra a 10KHz, considerando che tale Ic è in grado di operare da 10Hz a 300KHz.
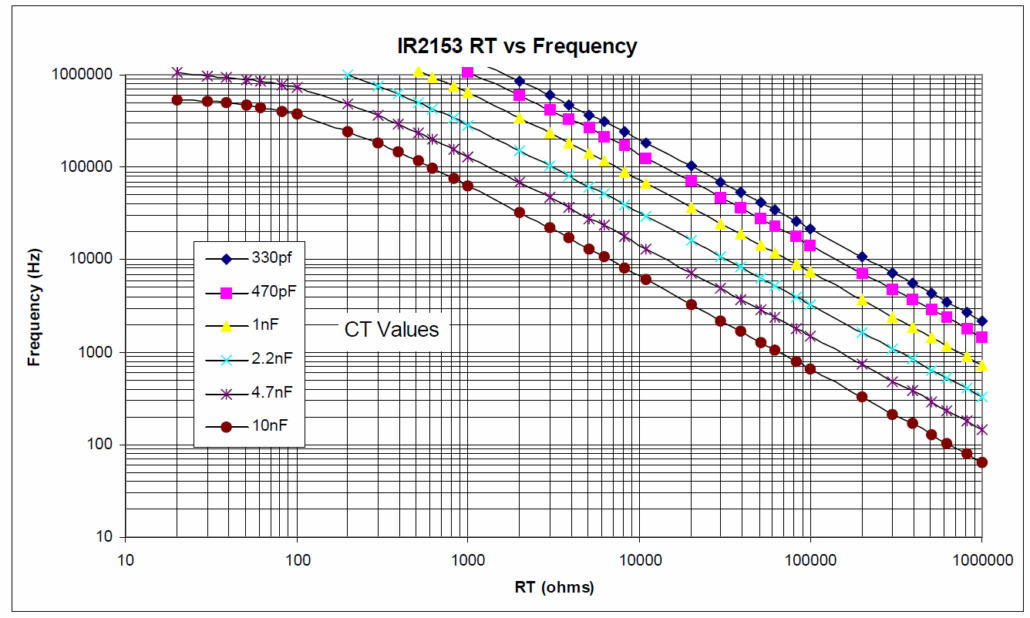
Lavorando praticamente tra 40 e 80KHz nell’uso come alimentatori basterebbero capacita di 220nF , per sicurezza si sceglie il valore di 1uF. La frequenza dell’oscillatore, può essere determinata dal grafico presente nel data dell’integrato, per comodità ne allego una copia.
Auto Amazon Links: Auto Amazon Links The Associate tag is not set. Please check your unit settings.
Auto Amazon Links: Nessun prodotto trovato.
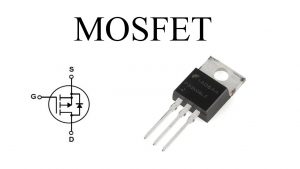
Scelta del mosfet più adatto
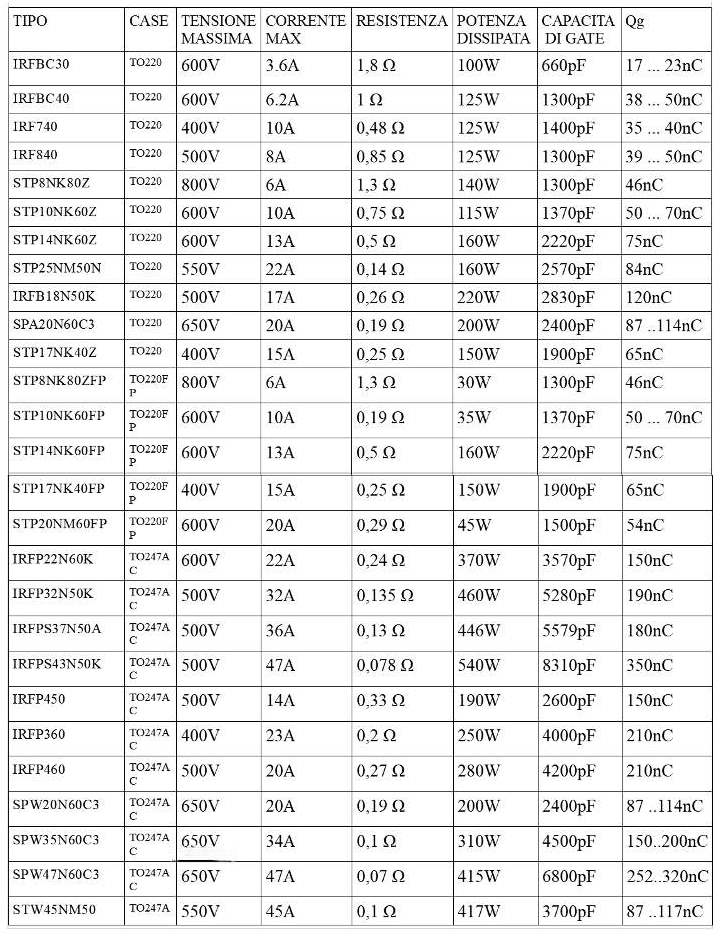
Nella tabella sottostante ho riassunto le caratteristiche dei mosfet più usati che ho trovato in giro per questo integrato. Un aiuto fondamentale in caso si debbano cercare degli equivalenti in caso di rotture, spulciando nella tabella possiamo scegliere tra i modelli in nostro possesso quello che pur non essendo proprio equivalente va comunque bene.
Essa può essere usata per la progettazione di alimentatori partendo da zero.
Calcolo della relativa resistenza di gate
Come è noto, le proprietà dinamiche di un transistor ad effetto di campo sono caratterizzate più accuratamente non dal valore delle sue capacità parassite, ma dalla carica totale del gate-Qg. Il valore del parametro Qg è matematicamente interconnesso dalla corrente impulsiva del gate con il tempo di commutazione del transistor, consentendo così allo sviluppatore di calcolare correttamente il nodo di controllo.
Prendiamo ad esempio il MOSFET IRF840 molto comune e presente nella tabella.
Con una corrente di drain Id= 8 A, una tensione drain-source Vds= 400 V e una tensione gate-source Vgs= 10 V, la carica gate è Qg= 63 nC.
Va specificato che a parità di Vgs, la carica del gate diminuisce con un aumento della corrente di drain Id e con una diminuzione della tensione Vds, nei calcoli visto che la entrambe le tensioni sono costanti prendiamo per buono il valore fornito dal costruttore, piccole variazioni non compromettono il risultato finale dei calcoli.
Calcoleremo i parametri del circuito di controllo, a condizione che sia necessario raggiungere il tempo di accensione del transistor ton = 120 ns. Per fare ciò, la corrente di controllo del driver deve avere il valore:
Ig= Qg/ ton= 63 x 10-9/ 120 x 10-9= 0.525 (A) (1)
Quando l’ampiezza della tensione di controllo pulsa sulla porta Vg = 15 V, la somma della resistenza di uscita del driver e la resistenza del resistore limitatore non devono superare:
Rmax= Vg/ Ig= 15 / 0.525 = 29 (Ohm) (2)
Calcoliamo la resistenza di uscita in uscita del driver cascade per il chip IR2155:
Ron= Vcc/ Imax= 15V / 210mA = 71,43 ohm
Roff= Vcc/ Imax= 15V / 420mA = 35,71 ohm
Tenendo conto del valore calcolato secondo la formula (2) Rmax = 29 Ohm, concludiamo che la velocità specificata del transistore IRF840 non può essere ottenuta con il driver IR2155.
Se nel circuito di gate è installato un resistore Rg = 22 ohm, il tempo di accensione del transistor è definito come segue:
REon= Rg+ Rf, dove
RE = resistenza totale
Rf = l’impedenza di uscita del driver,
Rg = resistenza esterna nel circuito di gate del transistore di potenza
REon= + 71,43 = 93,43 ohm;
Ion= Vg/ RE, dove
Ion = la corrente di pilotaggio
Vg = valore della tensione di gate di controllo
Ion= 15 / 93,43 = 160mA;
ton= Qg/ Ion= 63 x 10-9 / 0,16 = 392 nS
Il tempo di spegnimento può essere calcolato con le formule precedenti:
REoff= Rf+ Rg= 35,71 + 22 = 57,71 ohm;
Ioff= Vg/ Reoff = 15/58 = 259mA
toff= Qg/ Ioff= 63 x 10-9 / 0,26 = 242nS
Per ottenere il valore del tempo reale è necessario aggiungere il tempo che fisicamente impiega il transistor per passare da uno stadio ad un altro e cioè 40nS per la condizione di on e 80ns per quella di off il tempo reale sarà
Ton 392 + 40 = 432nS, e Toff 242 + 80 = 322nS.
Ora resta da stabilire se un transistor di potenza avrà il tempo di chiudersi completamente prima che il secondo inizi ad aprirsi. A tal fine, sommiamo Ton e Toff per ottenere 432 + 322 = 754 nS, equivalenti a 0,754 μS.
Dal data si ricava che il DEAD TIME del IR2151 non può essere usato perchè è di 0,6 μS.
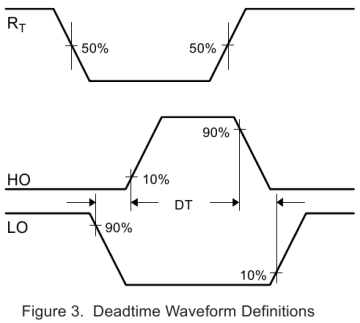
Nel datasheet si dice che Deadtime (tip.) È fisso e dipende dal modello, ma c’è anche una figura molto imbarazzante da cui si ricava che DEAD TIME è il 10% della durata dell’impulso di controllo:
Per dissipare i dubbi, ho fatto dei test con un oscilloscopio a due canali su un circuito base per vedere cosa ne usciva fuori, la curiosità di un bimbo per le cose a me nuove non la ho mai persa, questo è il risultato:
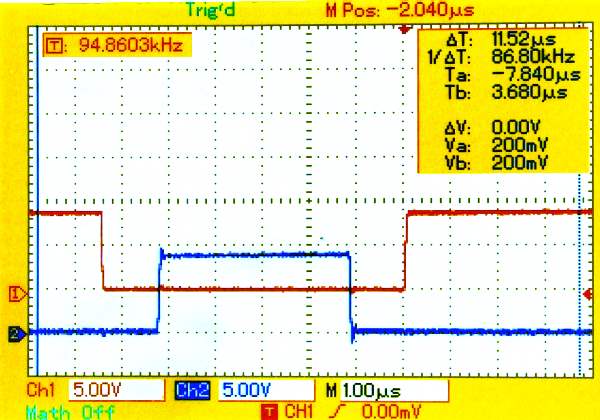
La alimentazione era di 15 V e la frequenza era di 95 kHz. Come si può vedere dalla fotografia, con una scansione di 1 μS, la durata della pausa è un po ‘più di una divisione, che corrisponde esattamente a 1,2 μS. Inoltre riducendo la frequenza si vede quanto segue:
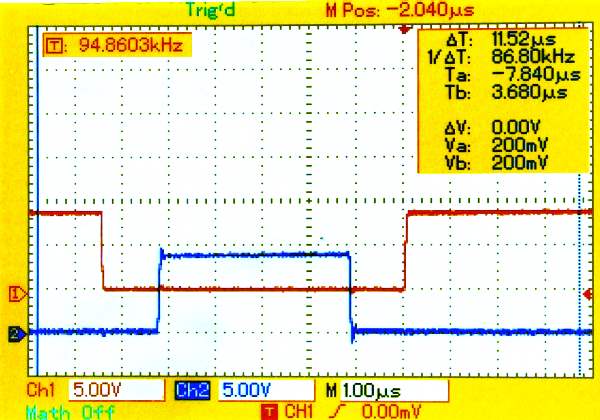
Come potete vedere dalla foto alla frequenza di 47 kHz, il tempo di pausa praticamente non è cambiato, quindi la parte che dice che Dead time (tip.) 1,2 μs è vera.
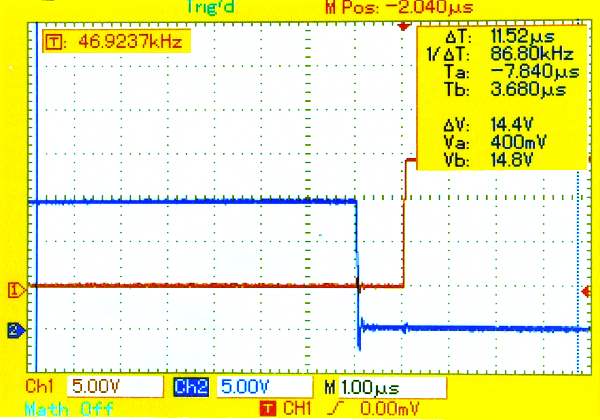
Poiché i circuiti funzionavano già, era impossibile frenare un altro esperimento, abbassare la tensione di alimentazione per assicurarsi che la frequenza del generatore non aumentasse. Il risultato è la seguente immagine:
Tuttavia, le aspettative non sono state giustificate, invece di aumentare la frequenza ho assistito ad una sua riduzione, comunque fortunatamente la variazione è meno del 2%.
Valori trascurabili considerando una variazione della alimentazione di oltre il 30%. Va anche notato che il tempo di pausa è leggermente aumentato. Questo fatto è piuttosto buono, quando la tensione di comando diminuisce leggermente si modifica il tempo di apertura e chiusura dei transistori di potenza e aumentare la pausa in questo caso è molto utile.
Da notare che UV DETECT con la sua funzione, blocca l’oscillatore in caso di abbassamento eccessivo della alimentazione per poi riattivare i chip quando sale oltre il livello minimo.
Ora torniamo al nostro esempio, con il resistore di gate di 22 Ohm la chiusura e apertura è ancora 0,754 uS con IRF840, tale valore è inferiore della pausa di 1,2 uS, tipica del chip stesso.
Così, con l’IR2155 ed il IR2153 attraverso i resistori 22 Ohm possono controllare IRF840, ma IR2151 sicuramente sarà scartato, oltre che il troppo basso dead time anche perché i transistori necessitano di corrente di 259 mA e 160 mA, mentre il IR2151 ha il valore massimo è 210 mA e 100 ma. Ovviamente, è possibile aumentare la resistenza installata nel gate dei transistor di potenza, ma in questo caso c’è il rischio di andare oltre Dead time.
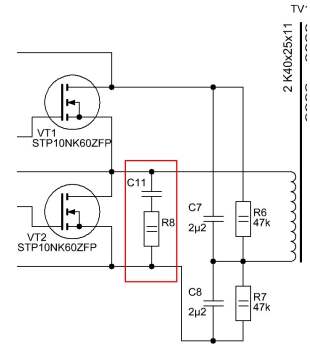
Per ridurre il rumore di commutazione dei transistori di potenza negli alimentatori switching usa un resistore di shunt in serie a un condensatore in parallelo all’avvolgimento del trasformatore. Questo nodo è chiamato snubber. Il resistore della catena di soppressione è selezionato con una valutazione di 5-10 volte maggiore della resistenza drain-source del MOSFET.
La capacità del condensatore è determinata dall’espressione:
C = TDT / 30 x R
TDT è il tempo di off dei transistor superiore e inferiore.
Sulla base del fatto che la durata del transitorio pari a 3RC, deve essere 10 volte inferiore alla durata di TDT.
Lo snubber ritardando i momenti di apertura e chiusura delle fluttuazioni di tensione controllo FET rispetto alla sua porta e riduce il tasso di variazione della tensione tra drain e la gate. Di conseguenza, i valori di picco degli impulsi di corrente impulsiva sono minori e la loro durata è più lunga. Quasi senza cambiare il periodo di accensione, il circuito di smorzamento riduce significativamente il tempo di spegnimento del FET e limita l’interferenza di spettro generato, lo si può trovare indifferentemente nella posizione disegnata o direttamente in parallelo all’avvolgimento del trasformatore, le differenze tra le due configurazioni sono così marginali da essere considerate nella pratica intercambiabili.
Di seguito alcuni schemi pratici visti in giro.
In quasi nessuno degli schemi seguenti è indicato il numero di spire nei trasformatori perché esse vanno calcolate in base alle caratteristiche del trasformatore stesso ed anche perché nella maggior parte dei casi degli schemi che ho trovato non è specificato.
Il più semplice alimentatore switching con IR2153 è un trasformatore elettronico con funzioni minime:
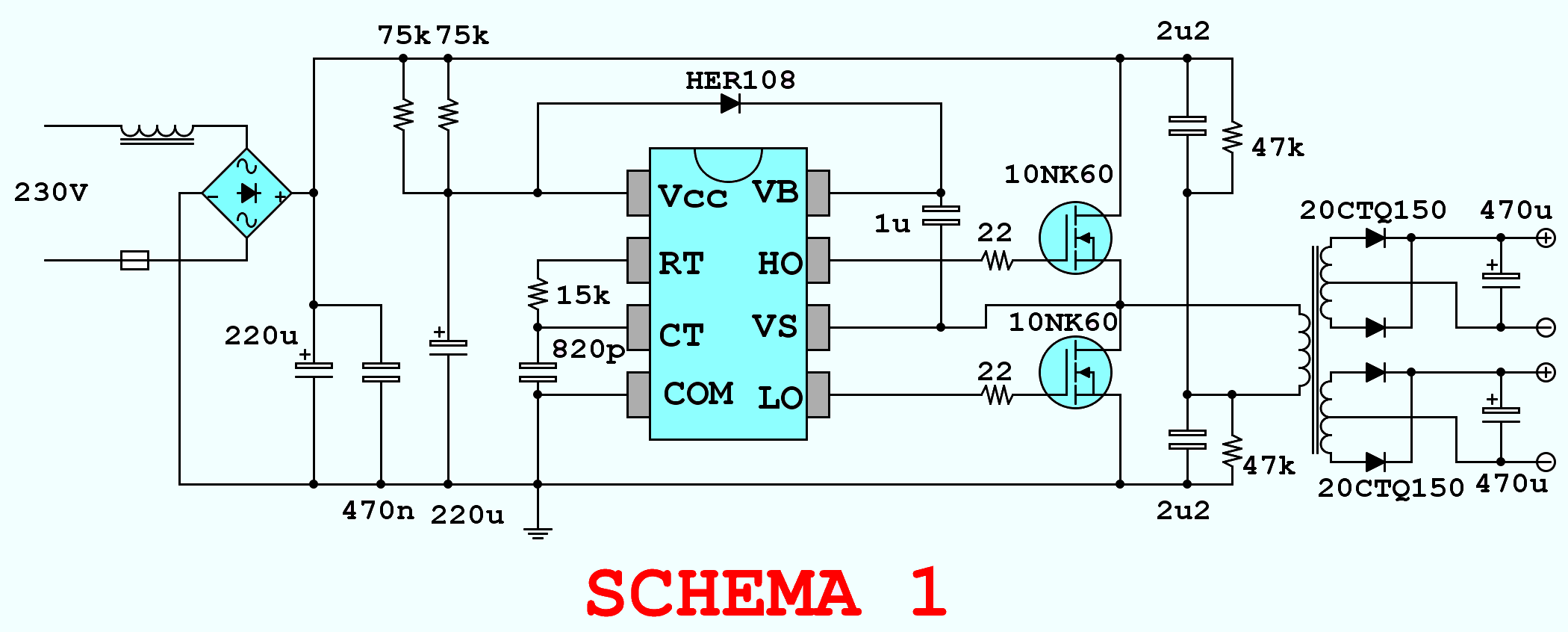
Nello schema 1, non vi è alcuna funzione extra, e il secondario è formato da due raddrizzatori di potenza bipolari costituito da un paio di diodi Schottky doppi. La capacità da 220 uF in uscita al ponte è calcolata con la formula empirica di 1 uF per ogni watt sul carico. In questo caso viene usato per un amplificatore stereo da 100W per canale. I due condensatori da 2u2 sul primario del trasformatore sono collocati nel range da 1 a 2u2 .
La potenza dipende dal nucleo del trasformatore e dalla corrente massima dei transistori di potenza e in teoria può raggiungere 1500 watt. In pratica, in questo schema la corrente massima dipende della temperatura dei transistore STP10NK60Z, la corrente massima di 10 A si ha solo a 25 gradi. Quando la temperatura del silicio sale a 100 gradi si riduce a 5,7A, e parliamo la temperatura del silicio, piuttosto che la temperatura del dissipatore.
Così la potenza massima deve essere scelta in base alla corrente del transistore diviso 3, se si alimenta un amplificatore di potenza e diviso per 4, se si alimenta un carico costante, come ad esempio lampade ad incandescenza.
Tutto ciò premesso si può teoricamente alimentare un amplificatore di
10/3 = 3,3A 3,3A x 155V = 511W totali.
Per un carico costante 10/4 = 2,5 A 2,5 A x 155V = 387W.
Dai calcoli si fa riferimento ad una tensione fissa di 155V, da dove viene tale valore? Esso deriva dalla tensione efficace sul condensatore di livellamento alla massima potenza, il valore è empirico ma, non si discosta molto dal valore reale e ci permette di semplificarci la vita senza scostamenti troppo grandi rispetto al reale.
In entrambi i casi si teorizza un rendimento del 100%, che non è raggiungibile .
Inoltre, volendo avere la potenza massima di 1500W visto che occorre 1 uF di capacità della alimentazione primaria per ogni watt di potenza sul carico, c’è bisogno di uno o piu condensatori per arrivare a 1500 uF totali e per caricarli occorre un soft-start per non far saltare il contatore ad ogni accensione.
Potenza maggiore e protezione in corrente nel seguente schema 2:
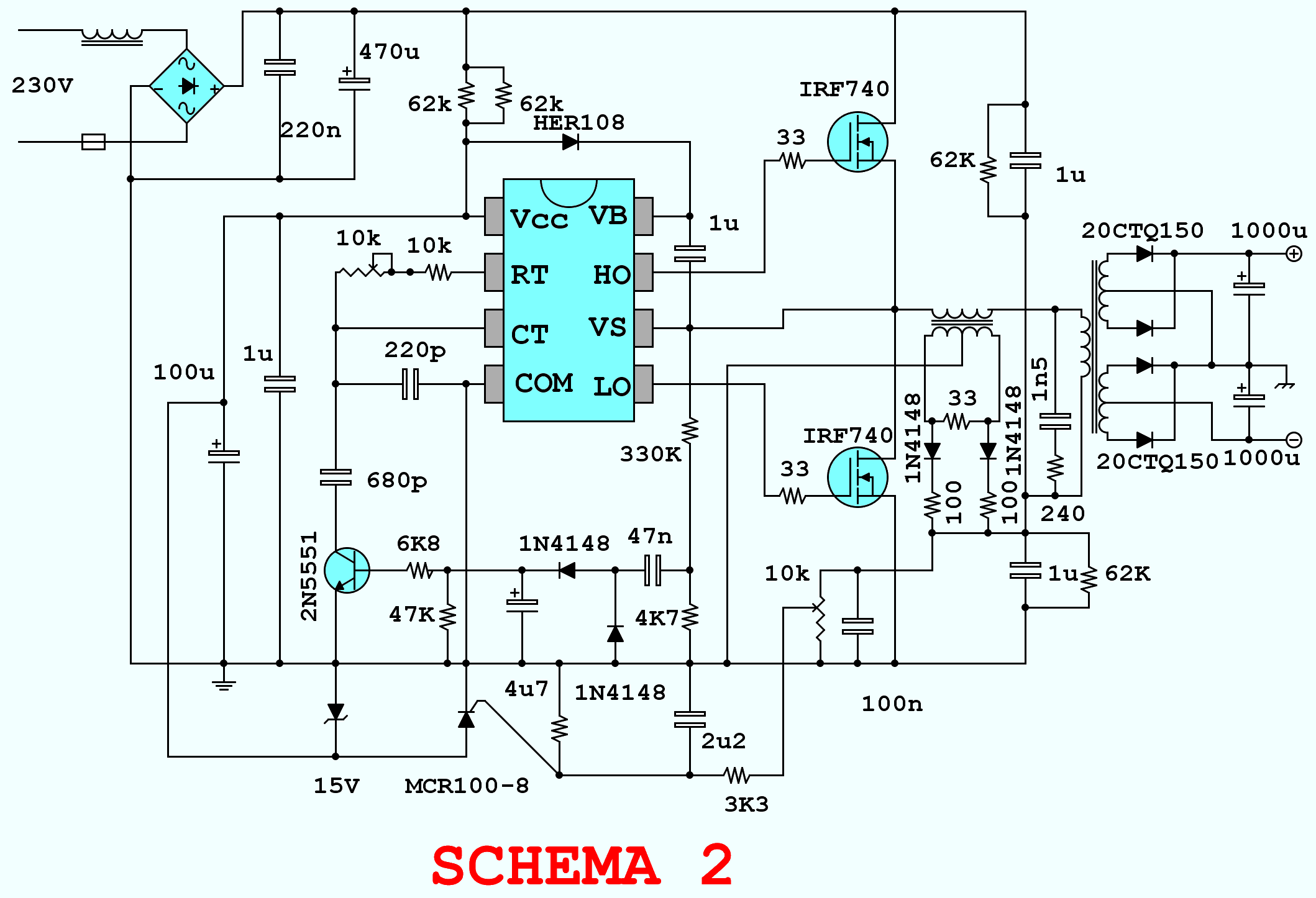
Viene implementata una protezione da sovraccarico grazie ad un trasformatore di corrente. Nella maggior parte dei casi si usa un anello di ferrite con un diametro da 12 a 16 mm, in cui sono avvolte da 60 a 80 spire bifilari di filo isolato di diametro 0,1 mm. Per formare un avvolgimento a presa centrale per il secondario. L’avvolgimento primario si fa avvolgendo da uno a due spire, a volte per comodità si fa anche una spira e mezza, quando entra in funzione abbassa l’alimentazione dell’integrato causando, grazie alle protezioni interne l’arresto del pilotaggio dei finali. Una volta scaricatosi l’elettrolitico l’SCR si interdice e si riforma l’alimentazione giusta per far ritornare a far funzionare i finali regolarmente.
Due resistenze da 62K in parallelo permettono di alimentare l’integrato con una buona escursione dell’alimentazione primaria (180 … 240V). Per non sovraccaricare il diodo zener interno se ne usa uno esterno da 1,3 W a 15 V.
Un circuito aggiuntivo basato intorno al transistor in basso permette un avvio graduale con frequenza più bassa, fino alla completa carica a ± 80 V dei condensatori da 1000 uF.
Con il partitore 330K-4k7 ed i diodi ad esso collegati si carica inizialmente l’elettrolitico da 4u7, tale tensione porta in conduzione il transistor che aumenta la capacità dell’oscillatore, giusto il tempo di caricare i condensatori senza sovraccaricare troppo la ferrite del trasformatore.
Trascorso tale tempo il transistor si isola e l’integrato torna a funzionare alla sua frequenza operativa.
La presenza di una rete di snubber elimina una buona parte dei disturbi causati dall’alimentatore.
Una ulteriore realizzazione di alimentazione pulsata in grado di fornire al carico 1500 W contiene un sistema soft-start per l’alimentatore primario mentre il secondario ha una protezione da sovraccarico, crea inoltre una tensione per la ventola per ventilazione forzata della aletta di raffreddamento. Il problema dello spegnimento rapido dei mosfet di potenza viene risolto mediante due transistor BD138, essi scaricano la capacità di gate dei mosfet con estrema semplicità.
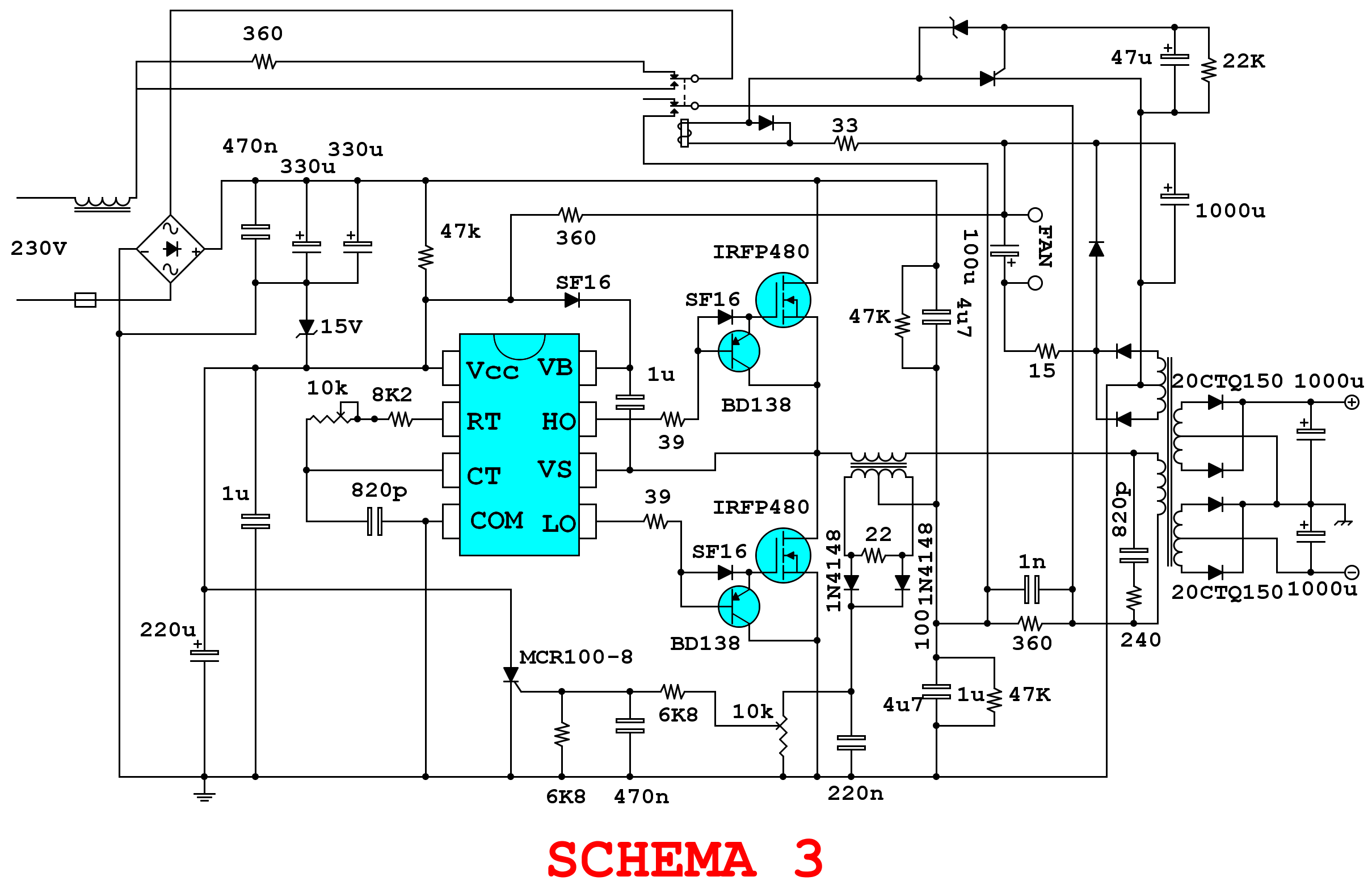
Tale sistema permette l’utilizzo di elementi relativamente potenti come IRFPS37N50A, SPW35N60C3, per non parlare e IRFP360 o IRFP460.
Al momento della accensione la tensione primaria sul ponte di diodi di potenza arriva attraverso il resistore 360 Ohm, poiché il relè è aperto. Inoltre, la tensione attraverso la resistenza da 47k viene applicata al chip, contemporaneamente tramite le due resistenze da 33 e da 360 che fanno capo al terminale di FAN e la bobina del relè. Con esse si carica gradualmente il condensatore da 100uF Poiché il secondo capo della bobina del relè fa capo ad un diodo zener e lo scr appena questa tensione raggiunge 13V farà innescare lo scr che ecciterà il relè. Qui si deve ricordare che il IR2155 inizia a funzionare già con una tensione di alimentazione di circa 9 V, quindi al momento dell’eccitazione del relè esso già funziona generando impulsi di controllo per il pilotaggio del primario.
Pilotaggio che avviene con potenza ridotta visto che con il relè aperto passa attraverso la resistenza da 360. È essenziale tale trucco per limitare la corrente di carica dei condensatori di filtro della alimentazione secondaria. Una volta che la bobina del relè è eccitata dal tiristore i suoi contatti shuntano entrambe le resistenze di limitazione.
Nel trasformatore è previsto un avvolgimento ulteriore per alimentare la ventola di raffreddamento (FAN), con una sua resistenza di limitazione della corrente.
Ultimamente mi è stato richiesto uno stabilizzatore di bassa tensione partendo però da una alta tensione di partenza, quello sottostante è una soluzione elegante a tale problema, il mosfet T2 viene sfruttato come fosse un diodo, quando si sale con le tensioni trovare diodi veloci che sopportino elevate correnti sono sicuramente più costosi di un mosfet comune.
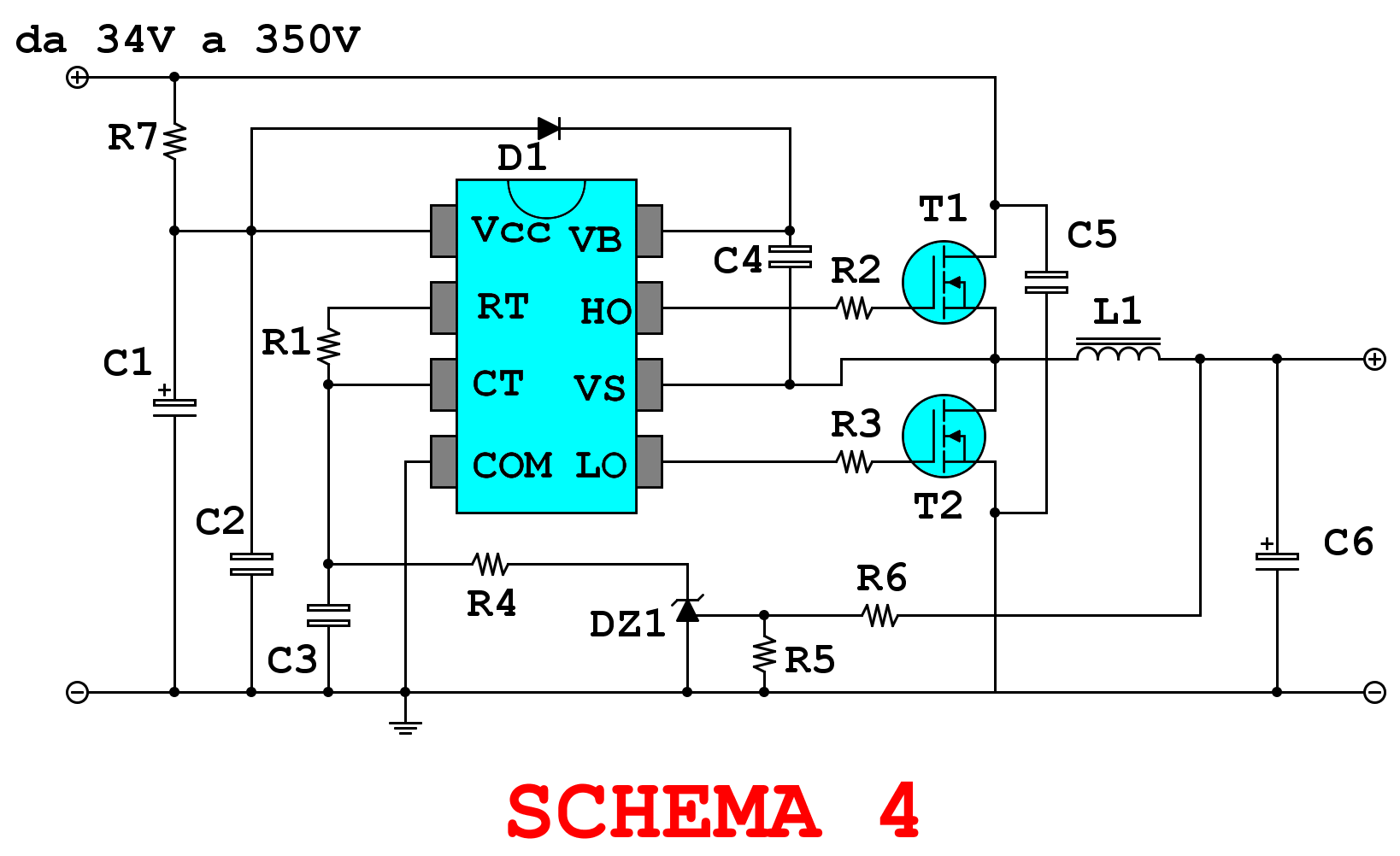
Lo schema 5 utilizza l’IR2155 per un circuito elevatore di tensione. In questo schema, il driver alto è collegato alla tensione di alimentazione:
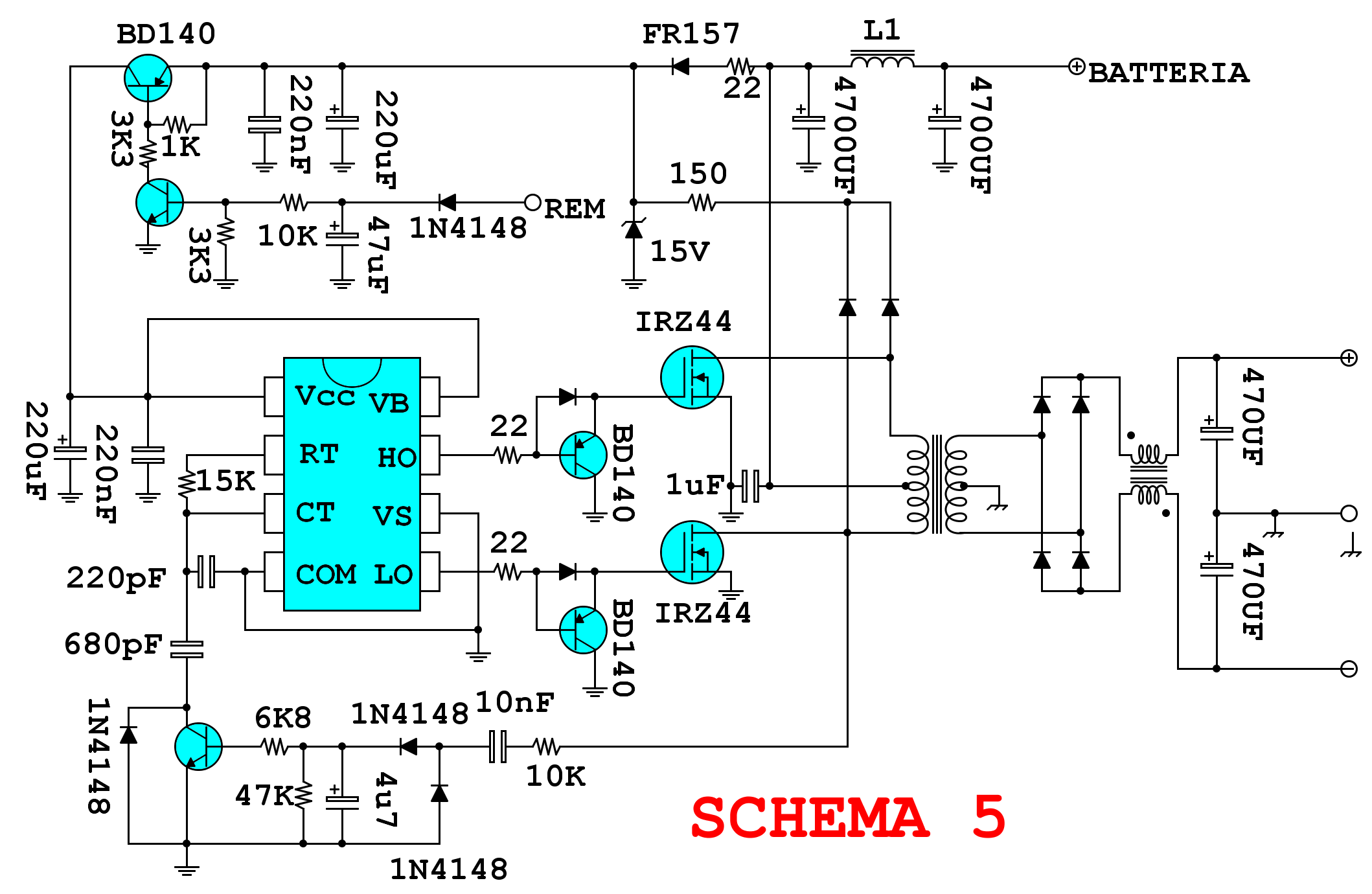
Come nella precedente realizzazione, la chiusura dei transistori di potenza viene fatta con i due BD140. Inizialmente parte con i 12V della batteria di bordo della vettura e poi alimentato tensione stabilizzata a 15 V tramite i diodi di soppressione delle extra-tensioni, la resistenza di limitazione e lo zener stabilizzano la tensione di alimentazione dell’integrato.
Non presente nello schema esiste un interruttore termico da fissare nelle alette, esso interromperà la tensione di REM spegnendo l’integrato. Tali diodi devono essere veloci veloci serie SF16, HER106, etc.
Con questo penso di aver chiarito molti aspetti di questa famiglia di integrati, ma come ultima chicca, posto l’alimentatore che uso, realizzato con un trasformatore recuperato da un alimentatore per PC:
Auto Amazon Links: Auto Amazon Links The Associate tag is not set. Please check your unit settings.
Auto Amazon Links: Nessun prodotto trovato.
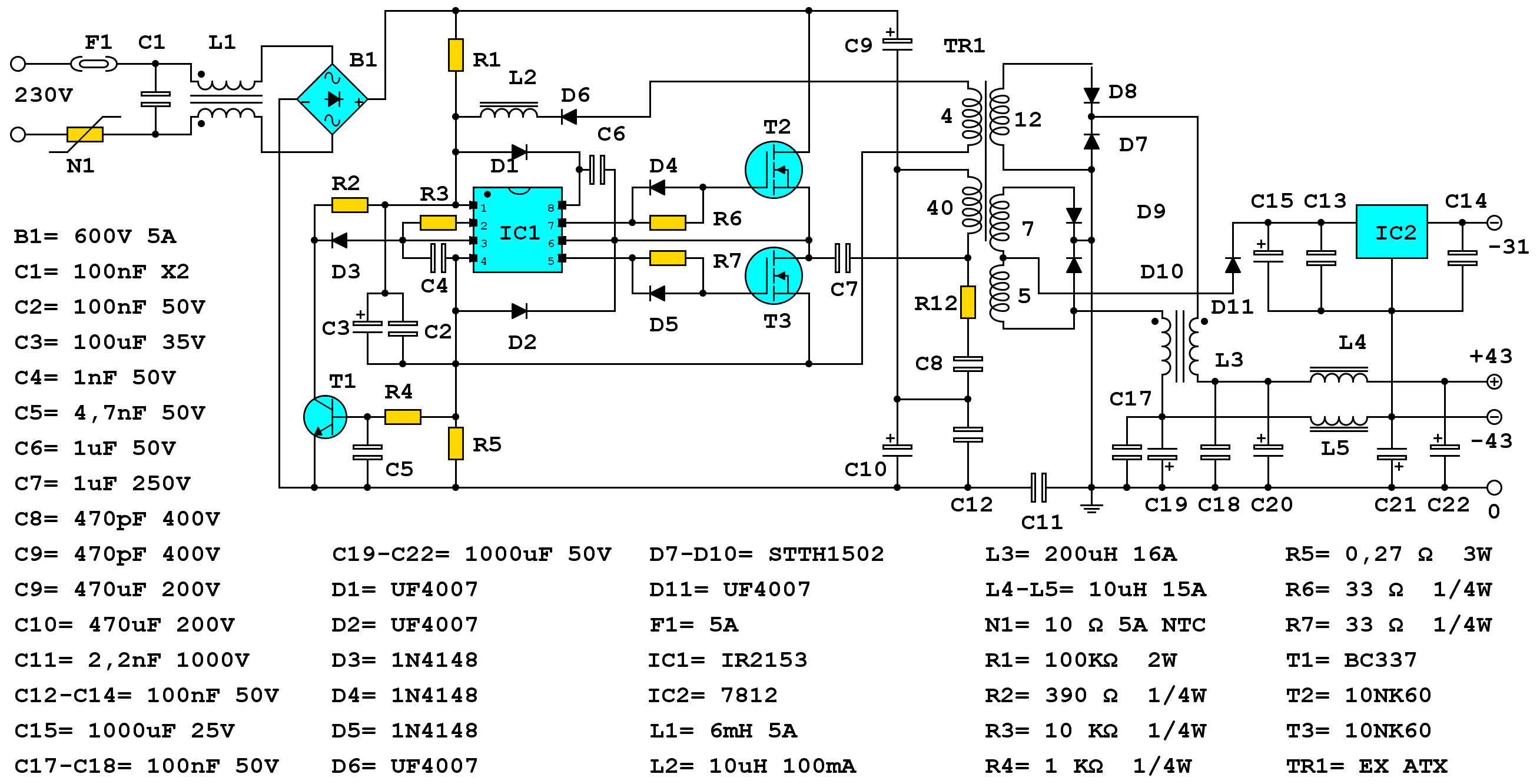
Unica aggiunta non presente nello schema e una rete di snubber composta da resistenza da 100 Ohm con i serie un condensatore da 100 pF in parallelo ad ogni diodo sul secondario.
Tale modifica successiva lo rende adatto anche per amplificatori lineari classici.
In esso è presente un soft start, un filtro emi ed una protezione da eccessivi assorbimenti, molti dei componenti passivi sono quelli dell’alimentatore originale, perché cercare altrove quello che avevo a portata di mano?
Si ringraziano gli amici di ElettroAmici: https://www.elettroamici.org/uso-ed-abuso-del-ir2153/
Auto Amazon Links: Auto Amazon Links The Associate tag is not set. Please check your unit settings.
Auto Amazon Links: Nessun prodotto trovato.

Grazie.

SanDisk 128GB Ultra scheda microSDXC + adattatore SD fino a 140 MB/s con prestazioni app A1 UHS-I Class 10 U1
14,67 € (a partire da 6 Maggio 2025 21:15 GMT +02:00 - Altre informazioniProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
Kingston Canvas Select Plus SDCS2/128GB Scheda microSD Classe 10 con Adattatore SD Incluso, 128 GB
10,80 € (a partire da 6 Maggio 2025 21:15 GMT +02:00 - Altre informazioniProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
TP-Link TL-WA850RE Ripetitore Wireless Wifi Extender e Access Point, Velocità Single Band 300Mbps, Porta LAN, Potenzia la tua copertura Wi-Fi, Compatibile con tutti i modem router wifi, Bianco
16,00 € (a partire da 6 Maggio 2025 21:15 GMT +02:00 - Altre informazioniProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
Amazon Fire TV Stick HD (Ultimo modello), TV gratuita e in diretta, telecomando vocale Alexa, controlli per Casa Intelligente, streaming HD
44,99 € (a partire da 6 Maggio 2025 21:15 GMT +02:00 - Altre informazioniProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)